- HOME
- ロボット事業について
- これまでの事例

Case studyこれまでの事例
ソフトウェア開発や開発したロボット技術の公開実験への取り組み、運用場所を想定した実験活動をご紹介します。
移動ロボット環境シミュレータの開発
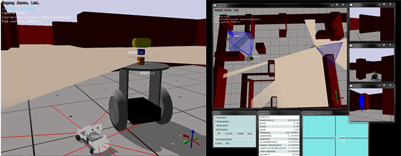
ロボットアプリケーション開発時の環境とロボットの動作をPC上でシミュレート・可視化し、 トライ&エラー時間の短縮やセンサーデータの直感的理解を助けるツールとして利用するロボット環境シミュレータを独自開発しました。
ロボット技術公開実験の参加
つくばチャレンジ2007(Real World Robot Challenge RWRC)

セグウェイRMP 200をベースに距離測定するレーザレンジセンサや制御用のPCをなどを搭載。ロボットが生活空間で自律的に動き回る技術開発を目的に参加しました。
運用場所を想定した実験活動
危機管理産業展2009 会場でのロボット走行実験
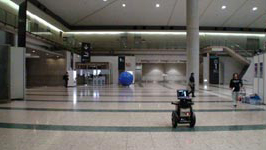
新エネルギー・産業技術総合開発機構(NEDO)「次世代ロボット知能化技術開発プロジェクト」の実証実験の一環として、危機管理産業展の会場にてRT-ミドルウェアで動作するロボットの走行実験を行いました。